System of Human-Robot Interfaces for Emergency Response Teams
Method: Cognitive Task Analysis, Workflow Analysis, Wireframing, Prototyping
Tools: Qt, Adobe Illustrator, Adobe Flash
Introduction
This project was funded by the Office of Naval Research (ONR) and it was a Multidisciplinary University Research Initiative Program (MURI) partnered with researchers at MIT and Stanford University.
My responsibility for implementing the UV Specialist interface included:
- Generate interface and interaction specifications based on task analysis (work sample);
- User interface and test application implementation using Qt;
- Design and conduct usability test of the interface;
- Qualitative and quantitative data analysis.
The UV(Unmanned Vehicle) Spelialist Interface
The UV specialist interface is a Qt-based application designed to improve remote operator (UV specialist) situation awareness, while maintaining a collection of tasks and robot teams during an emergency incident scenario.
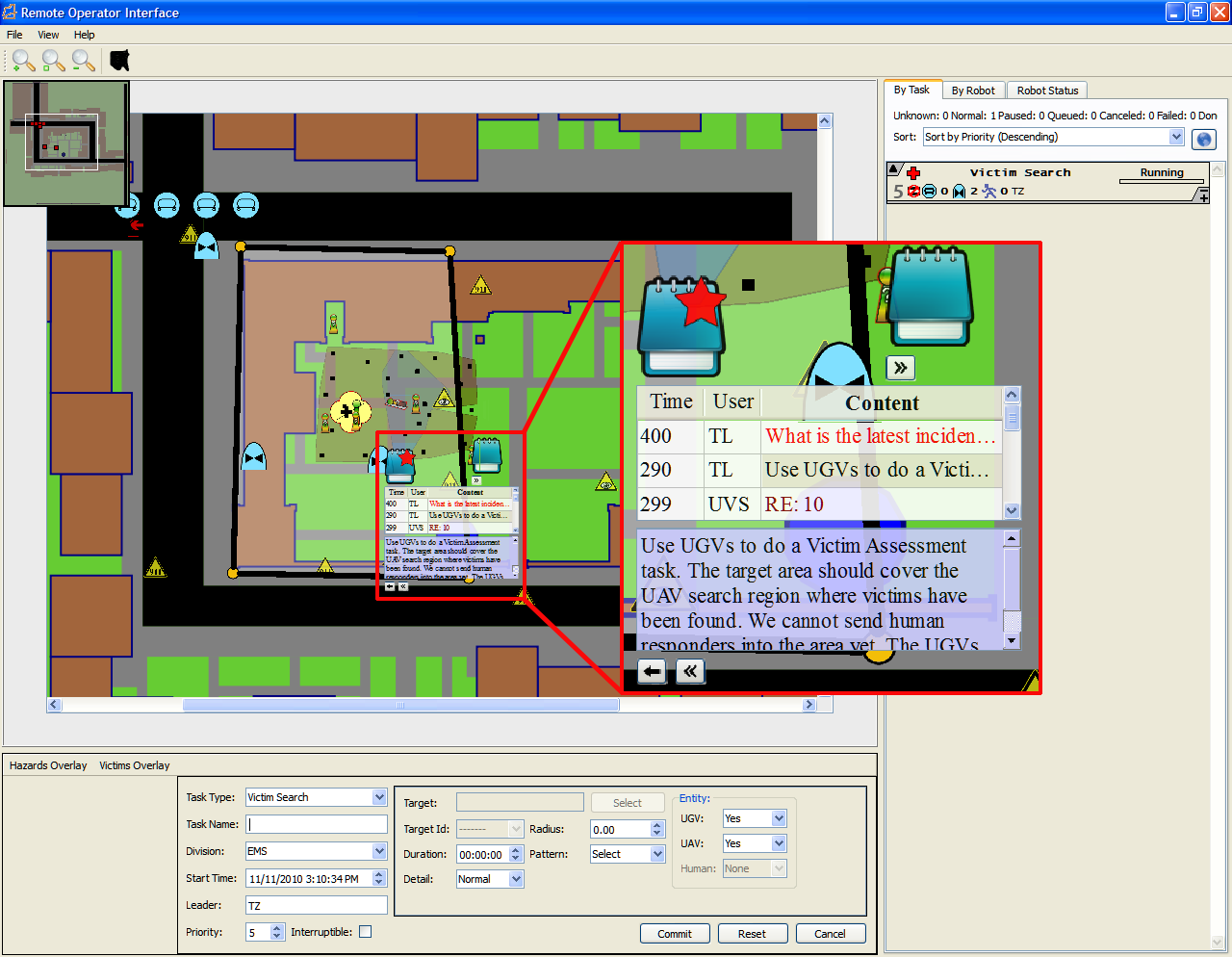
A screenshot of the UV Specialist interface:

The application is composed of a collection of widgets (components) that provide diverse functionality and expandability. The primary interface widget is the map display (center of the Figure), which presents a portion of the response area. Unmanned vehicles (UVs), tasks, and task-specific information items (e.g., identified victims and hazards) are also displayed on the map. The UV specialist can zoom in on a map region using the mouse scroll wheel. From the zoomed view, the UV specialist may either use the scroll bars to navigate the map area or grab any portion of the map to drag it to the desired position (i.e., map panning). The task panel (far right side of the Figure) provides relevant information regarding the tasks created by the UV specialist, and the assignments and status of each UV. The bottom panel is the UV task creation panel, where the UV specialist selects the task type and inputs required information to create tasks (e.g., searching for victims, victim assessment, hazard sampling, bomb surveillance, etc.) that the UVs execute.
The UV Specialist interface is integrated with the ONR MURI system and allows the user to specify high-level commands, such as search an area for victims, that are allocated by MIT’s mixed-initiative tasker to MIT’s ground or aerial robots. The MIT mixed-initiative tasker can also allocate tasks autonomously to robots and notify the remote operator of such allocations. A touch screen version of the UV Specialist interface has been integrated with Kansas State University’s robotic team.
Evaluation of a Geospatial Annotation Tool for UV(Unmanned Vehicle) Specialist Interface
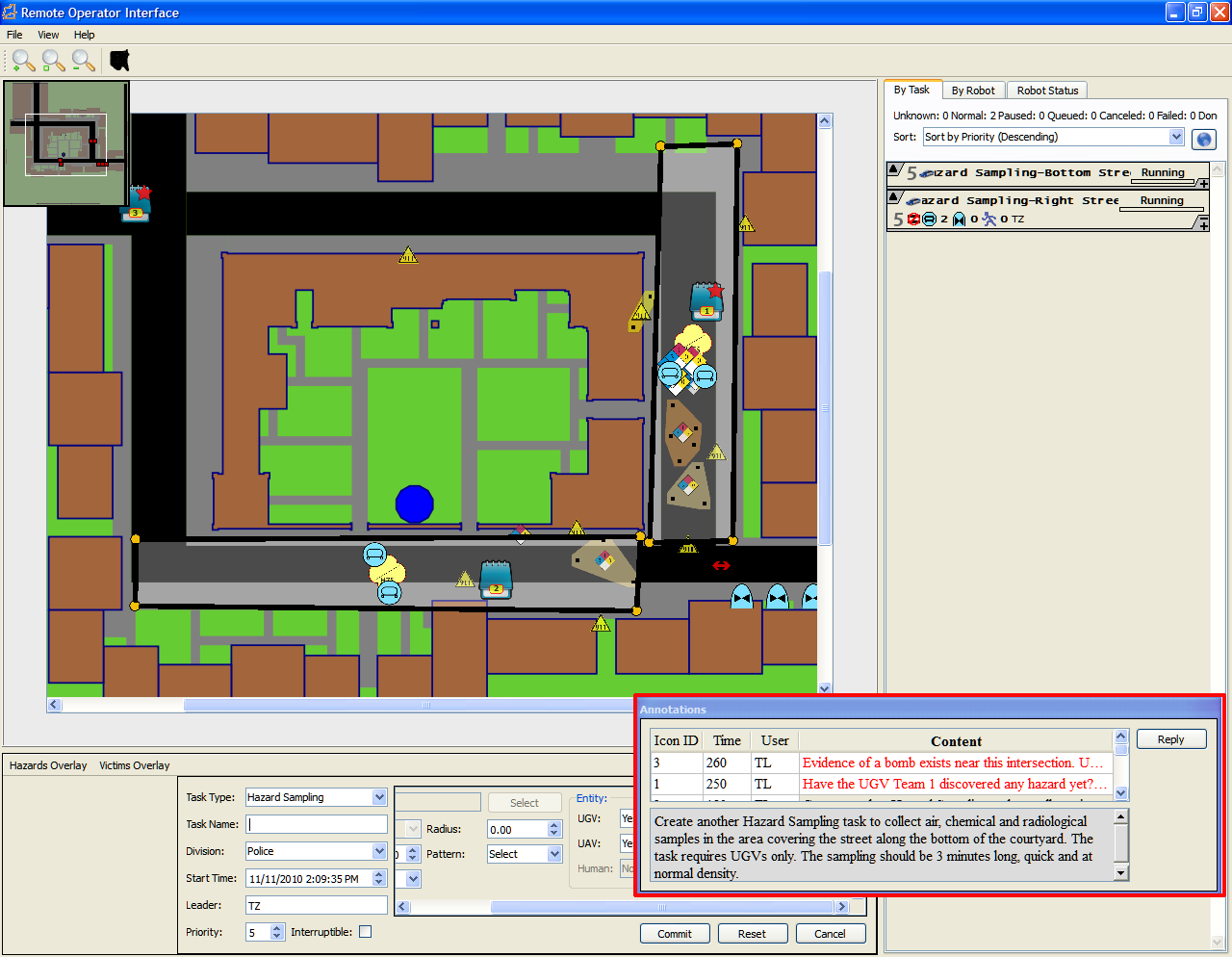
I developed a map-based widget to support collaborative control of unmanned vehicles (i.e., robots). The widget had two annotation designs: the annotation contents were directly anchored on the map in the first design, while in the second design annotations were summarized in a separate panel on the interface.
First Design: Individual annotations directly anchored on the map
Second Design: Annotations summarized in a separate panel
I also conducted a user evaluation of the annotation widget. In the evaluation, participants followed instructions from a simulated team leader and assigned unmanned vehicles to different tasks for two simulated scenarios that include searching for victims and collecting hazardous materials samples.
The evaluation results demonstrated the potential of using geospatial annotations to enrich communication and support map-based unmanned vehicle control. Participants appreciated the direct location reference feature of the first design and had generally shorter response time, but felt that the second design provided better usability and lower task workload.
The results above suggest that the user experience depends on the manner of obtaining information from the annotation tools, and the integration of the tool with user’s task flow and other interface components, such as the map display. These findings can be used as a basis for designing geospatial annotation tools for team collaboration that better fit user needs and preferences.
Related publications
Zhang, T., and Adams, J. A. (2012). Evaluation of a geospatial annotation tool for UV(Unmanned Vehicle) specialist interface. International Journal of Human-Computer Interaction, 28(6), 361-372.