Anthropomorphism and Emotions in Human-Robot Interaction
Method: Experiment Design, Physiological Workload Measurement(HR and GSR), Mixed Model Statistical Analysis Tools: C++, SAS, Matlab
Background
Due to the current shortage of nurses for patient services, existing nursing staffs are overworked and there is a high potential for errors in task performance. As the nursing shortage is expected to increase in the future, it is possible that service robots will need to take over some routine patient service tasks and communicate directly with patients. Currently, there are commercially available service robots (e.g., Aethon Tug) that can navigate autonomously in large-scale hospital workplaces and deliver medicines to nurse stations. However, these robots typically do not deliver medicines directly to patients and thus are not designed to support close interaction with patients.
If future service robots are to directly interact with patients like human nurses do, patient emotional reactions will be an important aspect of such interaction ; however, few studies have examined emotional responses of users in interacting with robots. In a healthcare environment, a patient’s emotional and social needs may be more important than traditional performance measures of human-robot interaction, such as efficiency and accuracy. Therefore, if knowledge of patient emotional responses to service robots is obtained, a design basis for future robots may be developed to facilitate positive patient experiences (e.g., in medicine delivery) and to increase the quality of healthcare.
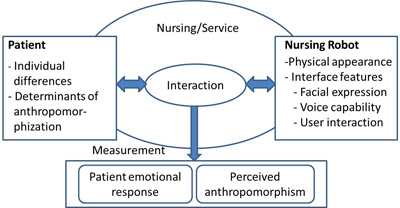
I proposed a research framework (figure below) addressing both the robot and the human user in the context of service applications. First, there may be psychological factors and individual differences (in experience, attitude, arousal, and expectation, etc.) that drive the tendency of anthropomorphizing robots during HRI. Opposite to this, a robot’s physical appearance and interface features also affect perceived anthropomorphism and the quality of the human-robot interaction. The underlying hypothesis is that anthropomorphism (human-like features) in robot design serves to mediate the perception of functional capacity, social capability and, consequently, system outcomes.
Research framework:
Method
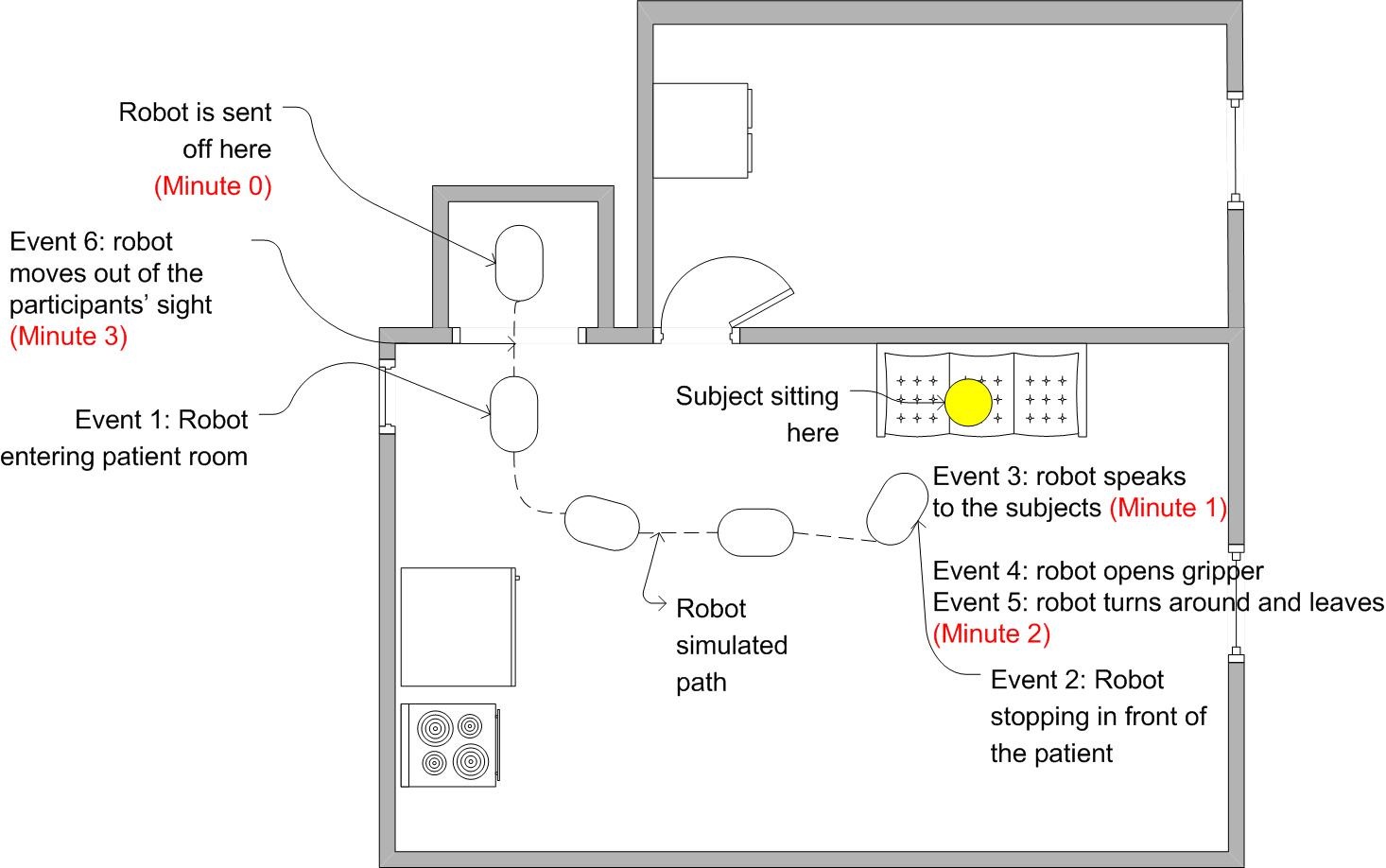
In the user test, 24 participants sat in a simulated patient room and a service robot delivered a bag of “medicine” to them. Repeated trials were used to present variations on three robot features, including facial configuration, voice messaging and interactivity. Participant heart rate (HR) and galvanic skin response (GSR)were collected. Participant ratings of robot humanness [perceived anthropomorphism] were collected post-trial along with subjective ratings of arousal (bored–excited) and valence (unhappy–happy) using the self-assessment manikin (SAM) questionnaire.
Layout of the simulated patient room and events along the robot path:
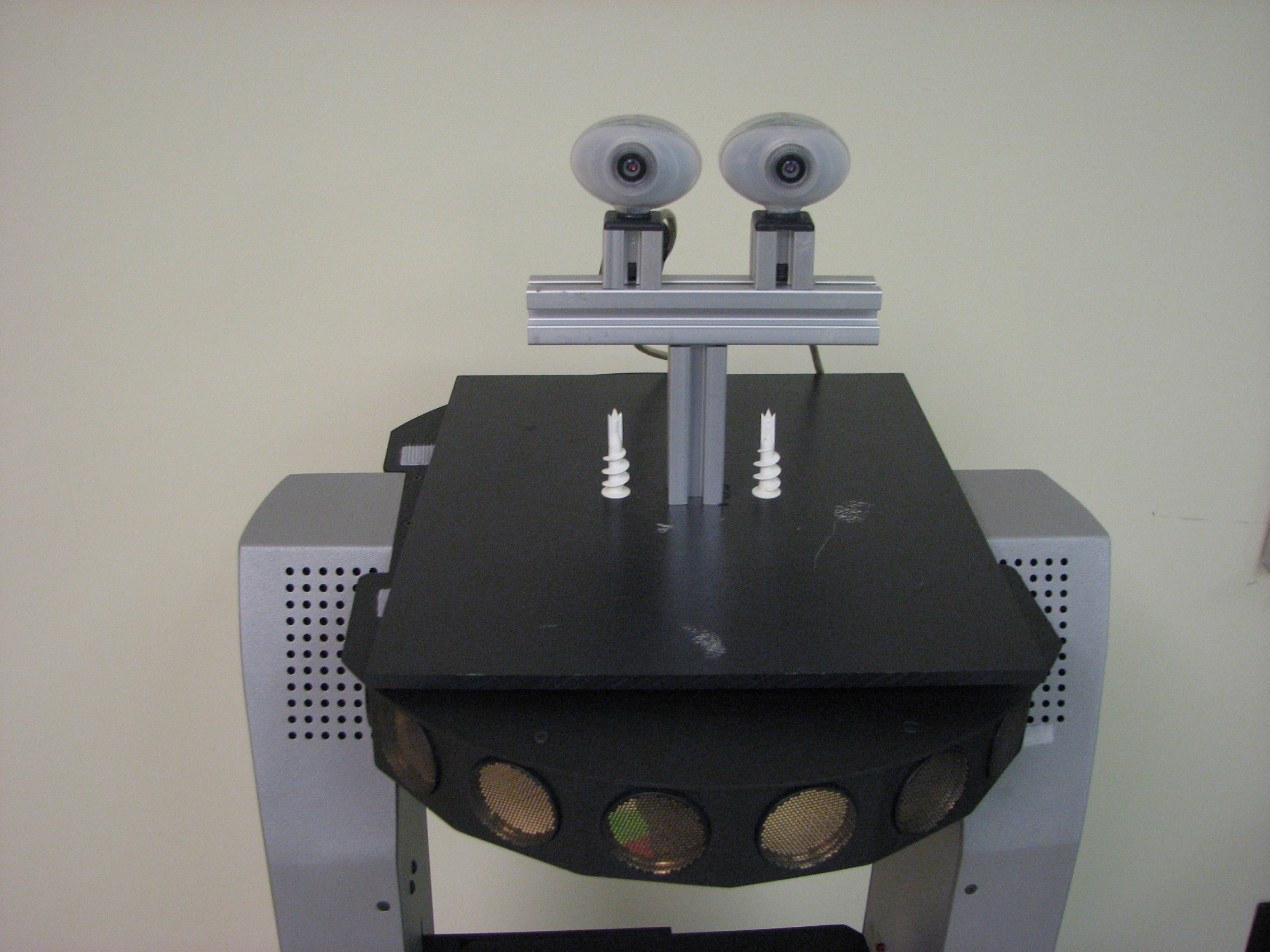
PeopleBot platform:

Abstract face configuration:
Human-like face configuration:

Visual message from robot:
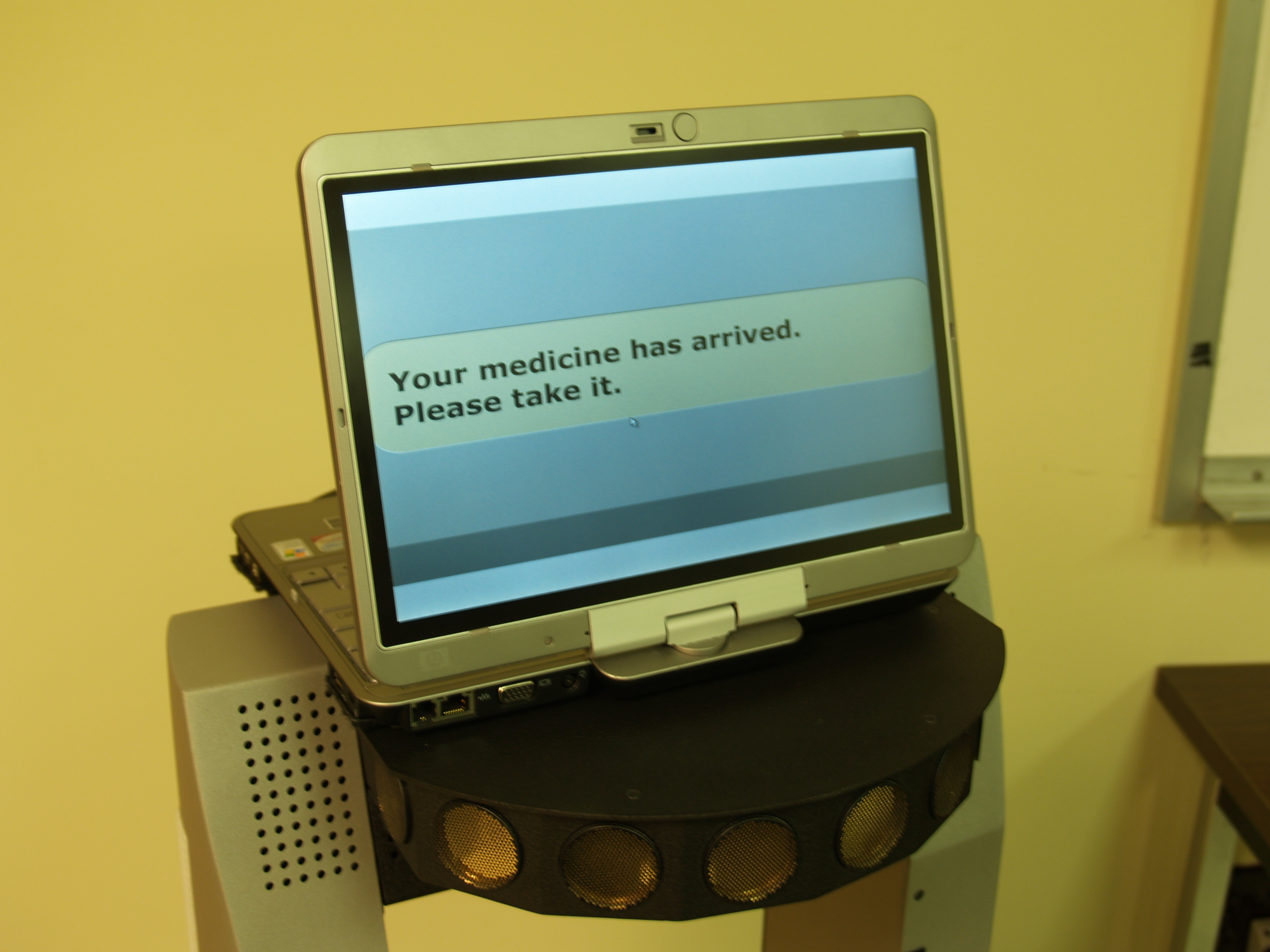
Visual message and confirmation from robot on touch screen:
Results
Results indicated the presence of all three types of robot features promoted higher perceived human likeness, emotional arousal and valence, compared to a control condition (a robot without any of the features).
Participant physiological responses varied with events in their interaction with the robot. The three types of features also had different utility for stimulating participant arousal and valence, as well as physiological responses.
In general, results indicated that adding anthropomorphic (human-like) and interactive features to service robots promoted positive emotional responses (increased excitement (GSR) and happiness (HR)) in elderly users. Results from this study could be used as a basis for developing affective robot interface design guidelines to promote user emotional experiences.
Related publications:
Swangnetr, M., Kaber, D. B., Zhu, B., & Zhang, T. (2014). Improving patient-robot interaction in health care: Service robot feature effects on patient acceptance and emotional responses. In A. Neustein (ed.), Speech and Automata in Health Care, 61-106. Berlin, Germany: De Gruyter.
Zhang, T., Kaber, D. B., Zhu, B., Swangnetr, M., Mosaly, P., & Hodge, L. (2010). Service robot feature design effects on user perceptions and emotional responses. Intelligent Service Robotics, 3(2), 73-88.
Zhang, T., Zhu, B., & Kaber, D. B. (2010). Anthropomorphism and social robots: Setting etiquette expectations. In C. Hayes & C. Miller (eds.), Human-Computer Etiquette. London: Taylor & Francis.
Zhang, T., Zhu, B., Lee, L., Swangnetr, M., Mosaly, P., & Kaber, D. B. (2009). Service robot feature and interface design effects on user emotional responses. In Proc. of the 17th Triennial Congress of the International Ergonomics Association (IEA), Beijing, China.
Zhang, T., Zhu, B., Lee, L., & Kaber, D. B. (2008). Service robot anthropomorphism and interface design for emotion in human-robot interaction. In Proc. of the 4th IEEE Conference on Automation Science and Engineering. Washington D.C.